 -::- Robot motion planning, path and trajectory planning, and navigation
-::- Robot motion planning, path and trajectory planning, and navigation
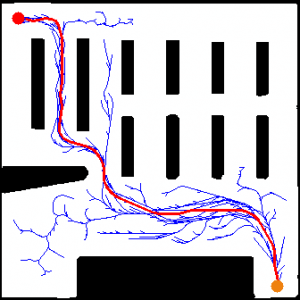
As one of the most important task of the robot, we have a special concern on motion and path planning and its variants. From the classical path planning e.g. potential field, VFF, VFH, to the modern sampling-based probabilistic motion planning e.g. Rapidly-growing Random Tree and Probabilistic Roadmap Method, are our main interest. These fields are now relatively attractive for high dimensional space. Focus of the research will be optimizing the motion plan using exact optimal solution, probabilistic, or even evolutionary technique, and its application for mobile robot, UAV, and submarine platform.
– ::- Robotic simulation and middleware
::- Robotic simulation and middleware
Since many of robots are intractable (to be bought), or it is dangerous to apply some algorithms directly to an expensive robot, it is common for researchers to use a simulated environment as a test bed. The robotic simulators are now vastly used to do such task. Gazebo, MORSE, V-REP, Stage, and 3D Game Engine are popular among the available realistic robotic simulators. On the other hands, distributed programming becomes well-known to split up the robot tasks into modular function. We have experienced on managing the modular robot function, using OpenRTM, YARP, and ROS middleware. An implementation of powerful robotic simulator using 3D game Engine is also being in progress.
 -::- Computer Vision: object detection and tracking
-::- Computer Vision: object detection and tracking
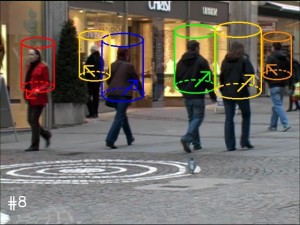
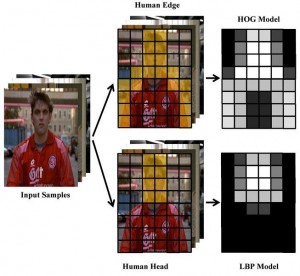
Many applications are derived from detecting the object(s) such as person, body part, car, road, bike, etc. There are vast possibilities in this field. We are interested in the development of algorithm for increasing the detection capability to be used in a real application. The tracking of the object(s) is also one of our concerns, since it cannot be separated from the detection process for the real environment. It also includes the usage of various hardware sources for implementing the object detection and tracking, such as monocular camera, stereo camera, and consumer 3D camera.
 -::- Computer Vision: object and pattern recognition, image processing, and video analysis
-::- Computer Vision: object and pattern recognition, image processing, and video analysis
Understanding the scene is one important thing to describe what happens or what is interesting in an image or video. Pattern recognition plays a big role to make such descriptions. We are interested in explaining the scene’s feature such as texture, attentions, etc to help a better interpretation of an image or video. We are also interested in broad cases of the object recognition, such as face, text, sign, non-rigid object, etc, using state-of-the-art techniques. We also open any collaboration on vast applications of the image processing and video analysis, including biomedical, video surveillance, and monitoring system.
 -::- Embedded system and its applications
-::- Embedded system and its applications
In the era where all information are supposed to be gathered online and mobile, there is a demand to simplify overall building blocks, including in the area of computer vision and robotics. We emphasize the usage of embedded system such as microcontroller-based, arm-based, and Single Board Computer-based systems. Currently, we are interested on developing and porting many computer vision algorithms on android devices and Raspberry Pi.
 -::- Robot Localization and Mapping
-::- Robot Localization and Mapping
Robot consciousness of its environment is the key for a successful mission assigned to the robot. Here, both indoor and outdoor localization and mapping become an obvious requirement. Some direction of these researches will be the application of SLAM algorithm to map a building using various sensors. Of course, effective implementations are also put in concern.
-::- Unmanned air systems, underwater systems, and Intelligent transportation systems
UAV, USV, and intelligent car now become hot topic on the robotic researches. We accommodate those who have an interest on these topics, including many possible application to the real world. It is also possible to have mixtures of robotic and computer vision to realize a feasible, working system. Included also in this field is researches on quadcopter, road lane detection, road mapping, traffic recognition, etc.
-::- Human-robot interaction and Human-computer interface
We are interested to make a robust interaction system to communicate with the robot and computer. By joint implementation with other fields such as image processing, we plan to achieve various applications for HRI and HCI. It includes teleoperation, web-based interaction, image-based interaction, and communication systems.
-::- Sensor integration, fusion, and perception
We often face many real deployment of robotic system uses several set of sensors. To have a meaningful data from those sensors, a good integration and information fusion is certainly needed. We are also interested in representing a data perception by considering multi-modality. Thus, employing many signal processing approaches become inevitable to gather a better information. Possible direction of the researches in this field are probabilistic data filtering, data association, multimodal integration, etc.
-::- Machine learning, deep learning, and its application
There are a great amount of the usage of the machine learning, in any fields. There are also vast number of machine learning algorithm, such as SVM, AdaBoost, Random Forest, Decision Tree, NN, etc. Our intention is to carefully examine the machine learning algorithm according to its applications, and improve the ability of the machine learning algorithm itself.
-::- Parallel processing and computing
The bottleneck of many robotic and computer vision algorithms are usually caused by naturally sequenced process. To break such curse, nowadays we have already seen several implementations using multicore processor on GPU as well as vectorized algorithms and threading on commercial CPU. CUDA and OpenCL have already become a standard for doing the parallel computing. From the CPU side, some optimizations like SSE, threading TBB, and OpenMP are very useful as an alternative to GPU programming, sometimes even faster.
-::- Computational optimization
All above research fields basically rely on the computational optimization. We are interested in optimization algorithm, especially dynamic programming, stochastic optimization, and evolutionary algorithm. Included also in this field are researches on Fuzzy-based optimization, Genetic Algorithm, Particle Swarm Optimization, Cross Entropy, etc.